
Bu yazıda hem günümüzdeki cerrahi operasyonlarda kullanılan teknolojilere değinmek hem de lisans araştırmamız kapsamında laparoskopik cerrahi için geliştirdiğimiz robot kolunu tanıtmak istiyoruz.
Laparoskopi ile cerrahi
Günümüzde bir çok cerrahi operasyonda, açık ameliyatlardan ziyade kapalı ameliyat olarak bilinen, minimal invaziv cerrahi (Minimally Invasive Surgery) tercih ediliyor. Minimal invaziv cerrahi hasta vücuduna açılan bir kaç delikten cerrahi araçların, ışık ve kameranın yerleştirilmesi sureti ile gerçekleştiriliyor. Bu tür operasyonlar hastaların daha hızlı ve ağrısız iyileşmesini, hastanede kalış süresinin kısalmasını, dolayısı ile hastane mikropları ile karşılaşma riskinin azalmasını ve de görsel olarak daha estetik yara izleri ile iyileşmesini sağlıyor.
1980’lerde ilk uygulamaları başlayan, ardından tüm dünyada artan bir hızda kullanılan laparoskopik cerrahi, bu tür cerrahi yöntemlerden biri. Laparoskopik ameliyatlar, uzun cerrahi aletlerin (40- 45 cm) hastanın karın bölgesinden periton boşluğuna yerleştirilmesi ile yapılıyor. Çoğu cerrahi alet farklı bir işlev için tasarlanmış olduğundan cerrahın ameliyat sırasında kullandığı aletleri bir çok kez değiştirmesi gerekiyor. İlk yıllarında laparoskopik cerrahi kapalı safra kesesi ameliyatları için sıklıkla kullanılmış, cerrahların laparoskopik cerrahide deneyim kazanması ve yeni aletlerin geliştirilmesi ile genel cerrahi prosedürlerinde de kullanılır olmuş. Teknoloji ilerledikçe laparoskopik kamera ile sağlanan görüntünün çözünürlüğü artmış ve cerrahlar ameliyat sırasında daha kaliteli görüntü ile daha rahat çalışabilir hale gelmişler.

Hareket kısıtına olası bir çözüm:
Laparoskopi tekniği kullanılan ameliyatlarda laparoskop, assistan veya cerrah tarafından görüntü almak için kullanılır. Laporoskop eğilmez ve bükülmez bir alet olduğu için zaman zaman cerrah doğru açıdan görüntüyü alamayabilir.
Sabancı Üniversitesi’nde Biyomekatronik dersi kapsamında yaptığımız projede bu zorluğun üstesinden gelmek için joystick ile hareket edebilen bir laparoskop tasarladık. Projemizde endoskopi kamerasını görüntü almak için kullandık. Kameranın ucunu ikisi yatay yönde ikisi dikey yönde hareket sağlamak üzere dört adet misina yardımı ile motorlara bağladık. Arduino ve joystick yardımı ile motorların kontrolünü sağladık. Böylece maliyeti düşük ve basit bir yöntem ile laparoskopun hareket kabiliyetini artırdık.
Detaylı bilgileri ve bağlantıların nasıl yapıldığını videomuzda bulabilirsiniz:
Cerrahi Robotlar
Cerrahi robotlar kullanıldığında ise cerrahlar ameliyatı bir konsol üzerinden yönetiyorlar. 2000 yılında ilk versiyonu onaylanan da Vinci ameliyat robotu en yaygın kullanılan ve ilk cerrahi robot. Başta genel cerrahi olmak üzere kalp, baş ve boyun, üroloji, jinekoloji, kolorektal operasyonlarda kullanılıyor. da Vinci sisteminde cerrah konsoldan doğrudan hasta üzerindeki 4 adet robot kolunu kontrol edebiliyor. Bu kollardan 3’ü değişik cerrahi aletleri (makas, cımbız, neşter vs), dördüncü kol ise sistemin 3 boyutlu (3B) kamerasını taşıyor. Robot kolları cerrahın hareketlerini birebir tekrarlayacak şekilde kontrol ediliyor.
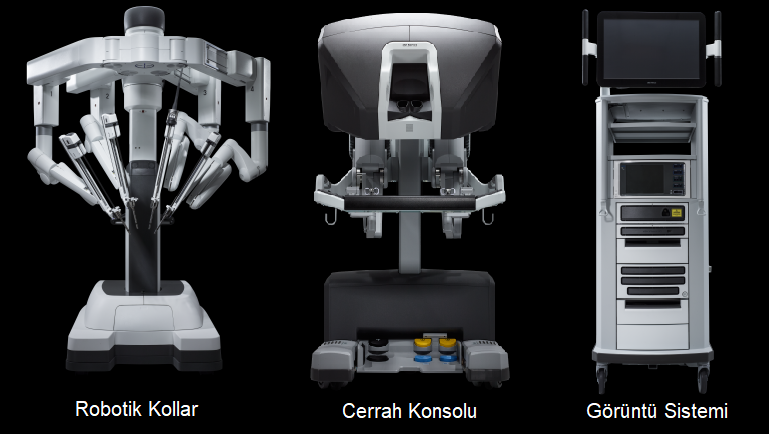
Cerrah konsoldan yüksek çözünürlüklü, 3B görüntü bilgisine dayanarak robot kollarını hareket ettiriyor. Konsolda cerrahın parmaklarını yerleştirdiği aletler cerrahın bileğini yormadan, robot kollarındaki cerrahi aletlere hassas hareket komutlarını iletebiliyor. Konsolun altındaki pedallardan cerrah iki farklı enerji kaynağını çalıştırabiliyor. Konsol ve robot ayrı odalarda bulunabileceği gibi ameliyat odasının durumuna bağlı olarak aynı odada da yer alabiliyorlar.
Cerrahi uygulamalarda da Vinci yalnız değil, Rosa isimli robot beyin cerrahisinde (medtech), Mako robotik-kol destekli teknoloji ortopedik ameliyatlarda (stryker), Corphat GRX hassas vasküler robot (Corindus) kardiyovasküler cerrahide kullanılan robotlardan.
Gelecekte neler olacak?
Robotik cerrahide robot kollarının yaptığı hareket sonucu doku ile oluşan etkileşimi doktorun konsolda parmaklarını yerleştirdiği cihazlardan hissedebilmesi (haptic feedback, sense of touch) aktif olarak çalışılan araştırma konularından. Çok kısa bir zaman içinde robotik cerrahi sistemlerin daha hassas, daha estetik, hasta konumuna göre sadece robot kollarını değil tüm robotik sistemin ayarlanabileceği, cerrahın konsol yerine kullandığı gözlüklerle hem 3B bilgiyi aldığı hem de bu bilgiyi görüntü verisi (CT, PET, MRI) ile elde edilmiş haritalarla eşleştirdiği, parmaklarını konsoldaki aletlere yerleştirmeden robot kolları her açıda hareket ettirebildiği ve robot kollarındaki dokunmayı hissedebildiği sistemlere dönüştüğünü göreceğiz.
Bunun yanı sıra, yapay zeka kullanımı ile tamamen otonom hale gelen cerrahi robotların gerçekleştireceği operasyonları sigorta şirketlerinin ne şekilde karşılayacağı da gündemimizdeki konulardan olacağa benziyor.




{kind=link}